
变分法学习笔记

只因变分法的优美在此记录学习笔记,参考书为《动态最优化基础》(蒋中一),对经济学学习者是非常友好的动态优化入门教材。
本笔记是快速学习后的个人理解,若有不严谨之处,还请多多包涵。
泛函
先来谈谈函数学习,
- 小学时开始接触未知数 $x$,
- 中学时开始了解具体函数 $f(x)=ax+bx^2+c$,
- 高中时开始了解抽象函数 $f(x)=f(-x)、f^\prime(x)=f(x)$
- 大学开始了解隐函数 $y\prime=y+y\prime \prime$,解出的是一类函数。
随着函数学习从具体走向抽象,我们开始掌握根据函数性质推断函数形式的能力。
泛函中的非线性泛函,就是函数之函数,告诉特定函数特征,我们就能框定函数形式范围,最后根据约束选出最优的函数。
例如厂商选择最优的生产过程、建筑师选择最好的建筑弧线……
以前,给定具体函数类型,我们寻找极值点;
现在,给定函数特征,我们寻找最好的具体函数。
一般而言,一个函数的特征约束可以用 $f(t,y(t),y\prime(t))$, 可以理解为 $f(时间,状态,方向)$。
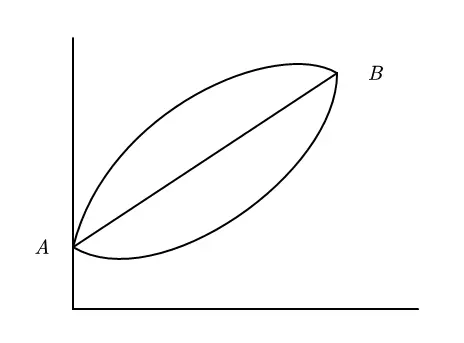
如下图,满足函数特征的从 a 到 b 的函数有三条,那条是最优的呢?于是引入了微积分算函数路径的极值。
变分法
在接触导数时,求极限使用了逼近的形式: $$ \lim_{\Delta x \rightarrow 0}{\frac{f(x+\Delta x )-f(x)}{\Delta x}} $$ 这里也采用类似的引入,假设最优函数为 $y^*$, 在其附近的一类函数使用 $y^*+\varepsilon P(t)$ 表示。
注意 $P(0)=P(T)=0$
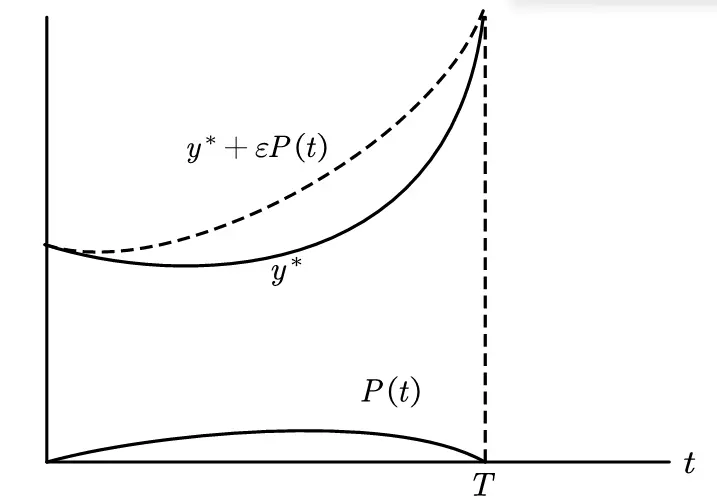
于是得到如下关于 $\varepsilon$ 的式子 $$ V(\varepsilon)=\int_{0}^{T}F[t,\underbrace{y^{*}\left(t\right)+\varepsilon p\left(t\right)}_{y(t)},\underbrace{y^{*}\left(t\right)+\varepsilon p^{\prime}\left(t\right)}_{y^{’}\left(t\right)}]dt $$ 极值点一阶条件为 $\frac{dV}{d\varepsilon}=0$
接下来对 $\color{red}{红色部分}$ 变形,使用分部积分 $\int_{t=a}^{t=b}vdu=vu\mid_{t=a}^{t=b}-\int_{t=a}^{t=b}udv\quad(u=u(t),v=v(t))$ $$ \begin{align} & \color{red}{\int_0^TF_{y^{\prime}}p^{\prime}(t)dt} \\ &=\begin{bmatrix}F_{y^{\prime}}p(t)\end{bmatrix}_0^T-\int_0^Tp(t)\frac d{dt}F_{y^{\prime}}dt\\ &=-\int_{0}^{T}p(t)\frac{d}{dt}F_{y^{\prime}}dt \\ &(因为P(0)=P(T)=0,详见P(t)干扰函数的设置图像) \end{align} $$ 将 $\color{red}{红色部分}$ 代入后可得: $$ \int_0^Tp(t)[F_y-\frac d{dt}F_{y^{\prime}}]dt=0 $$ 考虑到扰动函数 $P(t)$ 可以是任意函数,因此如果要满足上式为 0,只能是 $F_y-\frac d{dt}F_{y^{\prime}}$ 为0。
于是我们得到了欧拉方程—— $$ F_y-\frac d{dt}F_{y^{\prime}}=0,t\in[0,T] $$ 当方程约束只包含三个变量,也就是 $F(t,y,y^\prime)$ 时,可以具体展开得到, $$ \begin{aligned} \frac{dF_{y^{\prime}}}{dt}=&\frac{\partial F_{y^{\prime}}}{\partial t}+\frac{\partial F_{y^{\prime}}}{\partial y}\frac{dy}{dt}+\frac{\partial F_{y^{\prime}}}{\partial y^{\prime}}\frac{dy^{\prime}}{dt}\\ =&F_{ty^{\prime}}+F_{yy^{\prime}}y^{\prime}(t)+F_{y^{\prime}y^{\prime}}y^{\prime\prime}(t) \end{aligned} $$ 展开得到 $F_{y^{\prime}y^{\prime}}y^{\prime\prime}(t)+F_{yy^{\prime}}y^{\prime}(t)+F_{ty^{\prime}}-F_{y}=0,t\in[0,T]$
给定泛函 $V(y)=\int_0^2(12ty+y^{\prime2})dt$
欧拉方程通解为 $y^*(t)=t^3+c_1t+c_2$
这里只说有哪些推广,不进一步展开。
当 $F$ 泛函只含有部分变量,例如 $F(t,y\prime)、F(y,y\prime)、F(t,y)$ 时,各有快捷处理方式。
欧拉方程的核心是 $F_y-\frac d{dt}F_{y^{\prime}}=0,t\in[0,T]$
当 $F$ 泛函含多元变量,高次变量时,核心也是从这个起点进一步展开。
悬链问题
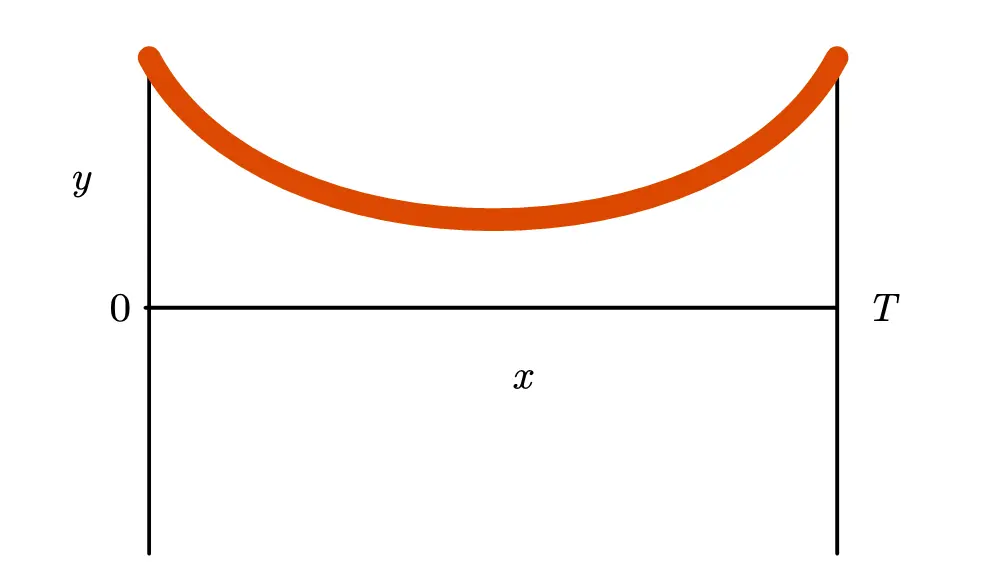
想象两个柱子间挂一根红线用于晾衣服。
建立坐标轴,将这根线绕着 x 轴绕一圈,这条线以怎样的曲度才能使绕一圈后的立体图形表面积最小呢?
考虑微元的勾股定理 $$ (ds)^2=(dx)^2+(dy)^2 $$ 可以得到线段的微分 $$ \frac{ds}{dt}=\sqrt{1+\left(\frac{dy}{dt}\right)^2}=(1+y^{\prime2})^{1/2} $$ 按照线段进行微分,将每个微分的圆周长($2\pi r$)积分就是旋转后的表面积。
于是得到如下泛函: $$ V(t)=\int_0^T 2\pi y ds=2\pi\int_0^Ty(1+y^{\prime2})^{1/2}dt $$ 将式子简化成以下式子: $$ V(t)=\int_0^Ty(1+y^{\prime2})^{1/2}dt $$ 使用欧拉方程可以得到 $$ y(1+y^{\prime2})^{1/2}-yy^{\prime2}(1+y^{\prime2})^{-1/2}=c $$ 简单化简(尝试分母有理化、平方等手段消灭分母的平方根),就可以得到化简后的式子 $$ y^{\prime}\left(\equiv\frac{dy}{dt}\right)=\frac{1}{c}\sqrt{y^{2}-c^{2}}\\ $$ 也就是 $$ \frac{cdy}{\sqrt{y^{2}-c^{2}}}=dt $$ 积分可得 $$ \int\frac{cdy}{\sqrt{y^2-c^2}}=c\ln\biggl(\frac{y+\sqrt{y^2-c^2}}c\biggr)+c_1=\int dt=t+c_2 $$ 整理下上面式子的形式,并把$ c_1 、c_2 $两个任意常数整合为$ k $,即可得到通解 $$ y^{*}\left(t\right)=\frac{c}{2}\left[e^{\left(t+k\right)/c}+e^{-\left(t+k\right)/c}\right] $$ 而 悬链曲线 就是以下形式 $$ y=\frac{1}{2}(e^{t}+e^{-t}) $$
一个均匀质地的线带(例如晾衣绳)均匀受到引力作用下垂,弧度也能如此推出来。
悬索桥、双曲拱桥、架空电缆都用到悬链线的原理。
建筑设计中一般使用的是以下形式: $$ y=c+a\cosh\frac{x}{a} $$ 自然社会,总是最优化控制!
最速降线问题
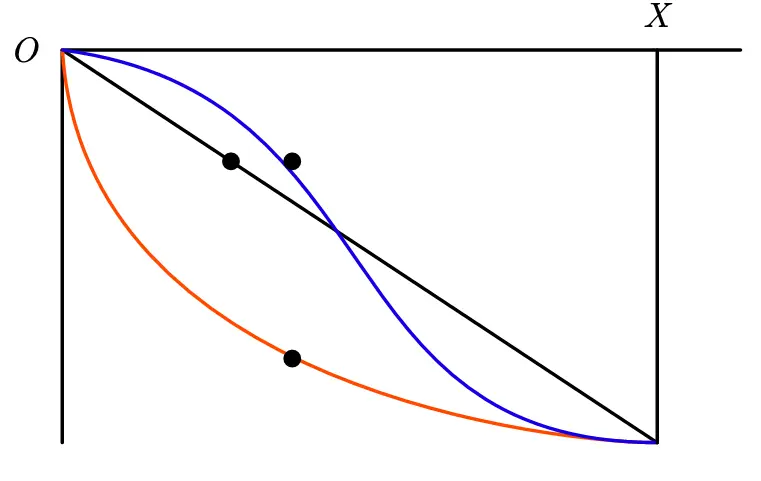
试想一下,弹珠比赛中有三种滑滑梯,一个参赛选手只有一次选择机会,那么选哪种滑滑梯赛道,小球能最快到达终点呢?
通过能量守恒关系可以得到 $$ \begin{align} \frac{1}{2}mv^2&=mgy\\ v&=\sqrt{2gy} \end{align} $$ 在悬链问题中,已经介绍过线的微元为 $ds=(1+y^{\prime2})^{1/2}dt$
所以考虑速度就是路程对时间求导 $$ v=\frac{ds}{dt}=\sqrt{1+y^{\prime2}}\frac{dx}{dt} $$ 联立以上方程 $$ \begin{cases} v=\sqrt{2gy}\\ v=\sqrt{1+y^{\prime2}}\frac{dx}{\mathrm{d}t} \end{cases} $$ 得到 $$ dt=\frac{\sqrt{1+y^{\prime2}}}{\sqrt{2gy}}dx $$ 而目标泛函所求的是总体用时最短 $$ T=\int dt=\int\frac{\sqrt{1+y^{\prime2}}}{\sqrt{2gy}}dx $$ 根据欧拉方程可以得到 $$ 2y^{\prime \prime}y+y^{\prime 2}+1=0 $$ 完整解法推荐参考浅谈变分法,而且里面还提到了关于这个问题其他数学家的解法。
总之其中一种解的展示方法为 ($a、c$ 为任意实数): $$ \begin{cases} x=a(\theta-\sin\theta)+c\\ y=a(1-\cos\theta) \end{cases} $$
这个形式和摆线相关

来源维基百科
垄断经济学问题
考虑垄断企业,利润函数写为 $F(P,P^\prime)$
经济含义是垄断企业拥有自主定价权
泛函则为 $$ V=\int F(P,P^\prime)dt $$ 代入欧拉方程可以得到 $$ F_{p^{\prime}p^{\prime}}p^{\prime \prime}+F_{pp^{\prime}}p^{\prime }-F_{p}=0 $$ 解这种隐函数就得玩骚操作,两边同时乘以 $p^{\prime}$,然后整体变形 $$ \begin{aligned} & \frac{d}{dt}(P^{\prime}F_{P^{\prime}}-F) \\ & = \frac{d}{dt}(P^{\prime}F_{P^{\prime}}) - \frac{d}{dt}F(P,P^{\prime}) \\ & = F_{P^{\prime}}P^{\prime\prime} + P^{\prime}\left(F_{PP^{\prime}}P^{\prime} + F_{P^{\prime}P^{\prime}}P^{\prime\prime}\right) - \left(F_{P}P^{\prime} + F_{P^{\prime}}P^{\prime\prime}\right) \\ & = P^{\prime}\color{red}{\left(F_{P^{\prime}P^{\prime}}P^{\prime\prime} + F_{PP^{\prime}}P^{\prime} - F_{P}\right)} \end{aligned} $$ 红色部分就是原式子
此时得到 $$ F-P^{\prime}F_{P^{\prime}}=c $$ $c$ 是常数,将 $F$ 写为常用利润函数 $\pi$,也就是以下关系 $$ \pi-P^{\prime}\frac{\pi}{\partial P^{\prime}}=c $$ 考虑静态垄断,垄断企业只做一次定价决策(更细分的静态博弈还要考虑产品差异,信息差异,博弈顺序,厂商进出状态)。
此时利润函数只和 $P$ 有关,和 $P^{\prime}$ 无关(毕竟都只有一次定价,压根就没产生过价格变化),显然 $P^{\prime}\frac{\pi}{\partial P^{\prime}}=0$, 此时 $\pi_s=c$。
再在静态博弈的基础上考虑动态博弈,在进行第一次定价后,垄断厂商们开始进行多次定价,此时利润函数如下, $$ \pi-P^{\prime}\frac{\pi}{\partial P^{\prime}}=\pi_s $$ 此时利润函数 $\pi$ 必然同时和和 $P$ 和 $P^{\prime}$ 有关,于是考虑 $\pi$ 和 $P^{\prime}$ 弹性,记为: $$ \frac{\partial\pi}{\partial P^{\prime}}\frac{p^{\prime}}{\pi}=\varepsilon_{\pi P^{\prime}} $$ 再代入动态垄断博弈的公式中,得到如下关系式: $$ \varepsilon_{\pi P^{\prime}}=1-\frac{\pi_\varepsilon}\pi $$ 也就是说,动态垄断中,厂商应根据这个关系式不断调整自己的利润函数。